Der Teufel im Detail – das ist wohl die treffendste Beschreibung für die Probleme mit dem Allradantrieb im Haval Jolion. Man könnte meinen, Allrad ist Allrad, aber weit gefehlt! Bei diesem System steckt die eigentliche Komplexität in der Steuerung, und genau da lauern die Fallstricke. Wir schauen uns heute genauer an, wo die Schwierigkeiten liegen und wie der Allradantrieb im Jolion eigentlich funktioniert.
Lassen Sie uns zunächst die Merkmale des Jolion-Allradantriebs beleuchten. Es handelt sich um ein System, das auf einer elektronisch gesteuerten Lamellenkupplung von BorgWarner basiert. Das bedeutet, die Kraftverteilung zwischen Vorder- und Hinterachse wird nicht mechanisch, sondern elektronisch geregelt. Das klingt zunächst modern und effizient, birgt aber eben auch die Möglichkeit für Software-bedingte Fehler. Die Kupplung selbst ist ein recht robustes Bauteil, aber die Feinheiten der Steuerung sind entscheidend für ein zuverlässiges Funktionieren. Denken Sie daran: Es geht nicht nur um das reine Zuschalten des Hinterradantriebs, sondern um eine präzise und situationsgerechte Kraftverteilung. Das System muss blitzschnell auf wechselnde Fahrbedingungen reagieren – und genau hier liegt oft der Hase im Pfeffer. Wir sprechen von Faktoren wie Straßenbeschaffenheit, Geschwindigkeit, Lenkwinkel und natürlich der Motorleistung. All diese Parameter fließen in die Steuerung ein und müssen perfekt aufeinander abgestimmt sein.
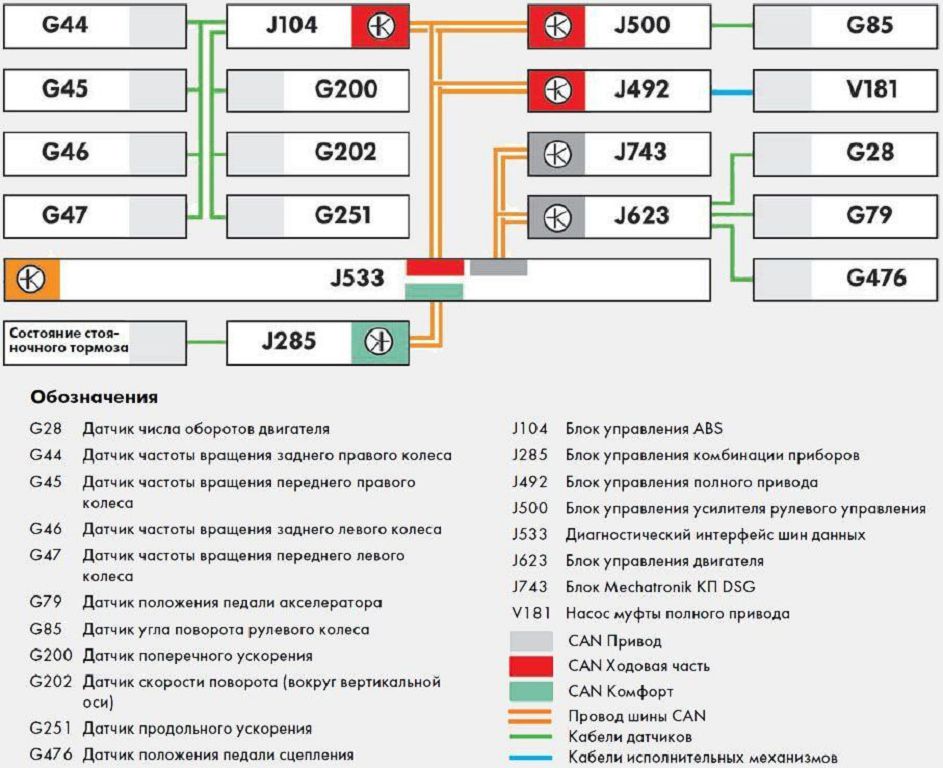
Kommen wir nun zur schematischen Darstellung der Funktionsweise der elektronischen Steuerung von BorgWarner. Stellen Sie sich vor, ein komplexes Netzwerk aus Sensoren, Aktuatoren und einem Steuergerät. Die Sensoren liefern permanent Daten über die Fahrsituation. Das Steuergerät wertet diese Daten aus und berechnet die optimale Kraftverteilung. Anhand dieser Berechnung steuert es dann die Lamellenkupplung, die die Kraft zwischen Vorder- und Hinterachse verteilt. Es ist ein hochkomplexer Prozess, der auf einer präzisen Kalibrierung und einer fehlerfreien Software beruht. Ein minimaler Fehler in der Software kann zu einem Fehlverhalten des gesamten Systems führen. Man könnte sich das vorstellen wie ein Orchester: Jedes Instrument muss perfekt spielen, damit die Symphonie gelingt. Fehlt nur ein einziger Ton, oder ist er falsch gespielt, leidet die gesamte Aufführung.
Und hier kommen wir zum letzten Punkt: der Bildung, sprich der Pumpen und Kalibrierung des Modells der dynamischen Kupplungssteuerung. Die Software des Systems muss während der Entwicklungsphase sorgfältig kalibriert werden. Das geschieht durch umfangreiche Tests unter verschiedenen Bedingungen. Dabei wird das Verhalten der Kupplung unter verschiedenen Lasten und Geschwindigkeiten analysiert und die Software entsprechend angepasst. Dieser Prozess ist extrem wichtig, denn er legt die Grundlage für das zuverlässige Funktionieren des Allradantriebs. Eine unzureichende Kalibrierung kann zu Problemen führen, die von einem unpräzisen Ansprechverhalten bis hin zu einem vollständigen Ausfall des Allradantriebs reichen. Man kann sich das vorstellen wie das Einfahren eines neuen Motors: Ein sorgfältiges Einfahren ist essentiell für die Langlebigkeit und die optimale Leistung. Ähnlich verhält es sich mit der Software des Allradantriebs. Eine sorgfältige Kalibrierung ist die Basis für ein zuverlässiges und effizientes System. Und genau hier liegt oft der Knackpunkt bei den Problemen mit dem Allradantrieb im Haval Jolion. Es scheint, als ob die Kalibrierung nicht immer optimal gelungen ist.
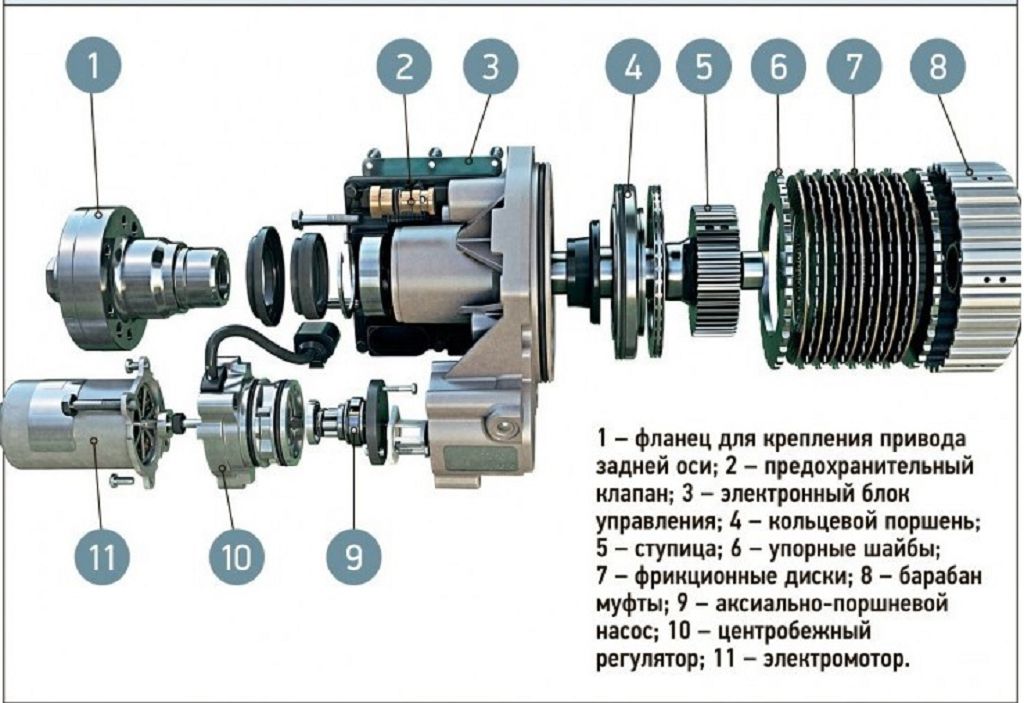
Okay, Leute, lasst uns mal genauer auf den Allradantrieb des Haval Jolion schauen, denn da gibt es einiges zu besprechen. Wir beginnen mit der elektronischen Kupplungssteuerung. Stellt euch das vor wie ein hochkomplexes Nervensystem, das den Vortrieb regelt. Im Kern sitzt ein Steuergerät, ein kleines Computerhirn, das permanent Daten von verschiedenen Sensoren auswertet. Diese Sensoren messen unter anderem die Drehzahl der Räder, die Motordrehzahl, die Gaspedalstellung, die Lenkwinkelstellung und natürlich auch die Raddrehmomentdifferenzen. Anhand dieser Informationen berechnet das Steuergerät permanent, wie viel Kraft an die Hinterachse geleitet werden muss. Das geschieht über eine elektronisch gesteuerte Lamellenkupplung. Diese Kupplung ist nicht mechanisch, sondern wird über einen Elektromotor angesteuert, der blitzschnell die Kraftverteilung zwischen Vorder- und Hinterachse regelt. Es ist ein unglaublich schnelles und präzises System, das in Bruchteilen von Sekunden reagiert und die Traktion optimiert. Man muss sich das wirklich als ein hochdynamisches System vorstellen, das ständig die optimale Kraftverteilung sucht, um den bestmöglichen Grip auf dem Untergrund zu gewährleisten. Es ist nicht einfach nur ein «an» oder «aus», sondern eine kontinuierliche Anpassung an die Fahrsituation. Denkt an Schnee, Eis, Matsch – da ist die präzise Steuerung der Kupplung essentiell. Aber auch auf trockenem Asphalt kann das System die Fahrdynamik positiv beeinflussen, indem es beispielsweise bei Kurvenfahrten die Traktion verbessert. Das ist ein wichtiger Punkt, den man oft übersieht: Der Allradantrieb im Jolion ist nicht nur für Offroad-Abenteuer gedacht, sondern verbessert auch das Fahrverhalten auf der Straße.
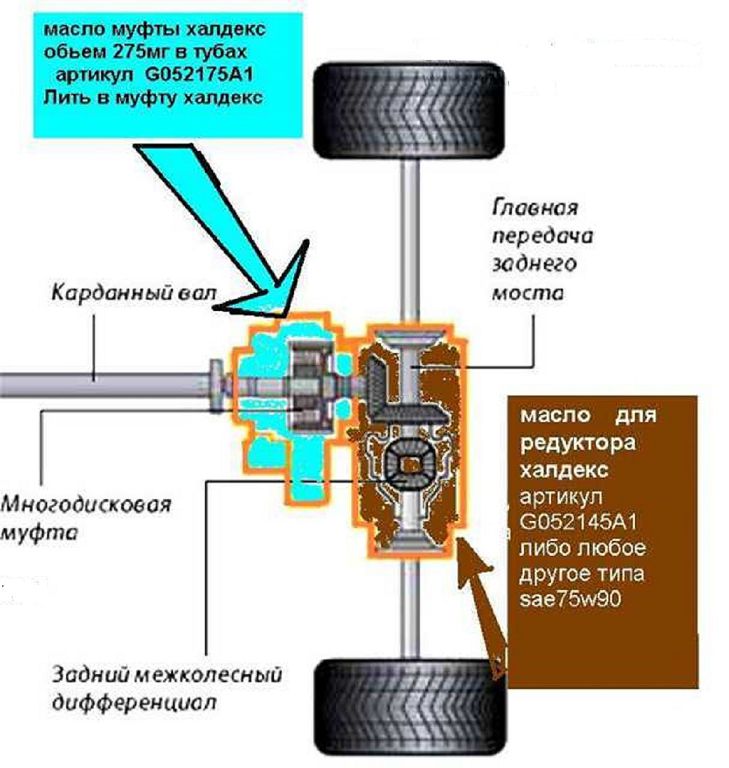
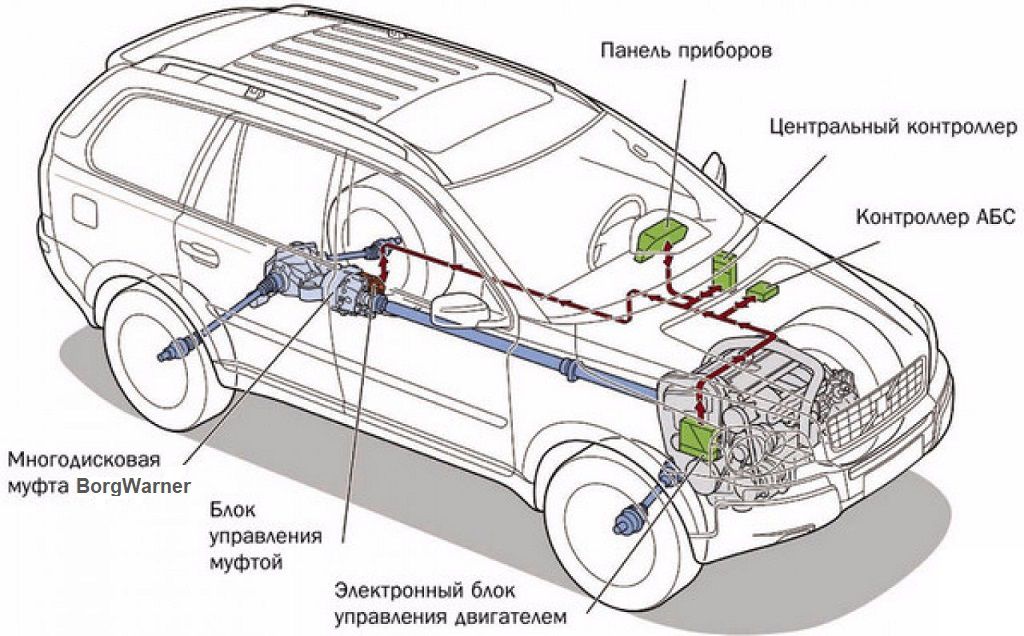
Kommen wir nun zur Hardware. Der Allradantrieb des Jolion ist ein relativ kompaktes System. Die Komponenten sind clever im Fahrzeug untergebracht, um Platz zu sparen und das Gewicht gering zu halten. Die Hauptkomponenten sind natürlich die elektronisch gesteuerte Lamellenkupplung, die sich an der Hinterachse befindet, der Elektromotor, der diese Kupplung steuert, und das Steuergerät, das das gesamte System überwacht und regelt. Zusätzlich gibt es natürlich noch diverse Sensoren, die die notwendigen Daten liefern. Die Qualität der verwendeten Komponenten scheint solide zu sein, aber wie bei jedem komplexen System können auch hier Fehler auftreten. Und genau da kommen wir zu den Software-Problemen, die einige Jolion-Besitzer berichten. Es gibt Berichte über unerklärliche Schaltvorgänge, unvorhergesehenes Ein- und Ausschalten des Allradantriebs, und sogar über Fehlermeldungen im Bordcomputer. Diese Probleme scheinen nicht immer reproduzierbar zu sein, was die Fehlersuche erschwert. Manche spekulieren über Software-Bugs, die durch Updates behoben werden könnten, andere vermuten Hardware-Probleme, die einen Werkstattbesuch erfordern. Es ist wichtig zu betonen, dass diese Probleme nicht bei allen Fahrzeugen auftreten, aber die Berichte zeigen, dass es ein potentielles Problem gibt, das Haval ernst nehmen sollte.
Zusammenfassend lässt sich sagen: Der Allradantrieb im Haval Jolion ist ein technisch interessantes System mit einer intelligenten elektronischen Steuerung. Die Hardware scheint solide zu sein, aber die Software scheint anfälliger zu sein als man es sich wünschen würde. Die Berichte über Software-Fehler sollten ernst genommen werden, und Haval sollte sich bemühen, diese Probleme schnellstmöglich zu beheben. Es ist wichtig, sich vor dem Kauf über diese potentiellen Probleme zu informieren und gegebenenfalls den Händler nach dem aktuellen Stand der Software-Updates zu fragen. Es ist ein komplexes System, das in der Praxis seine Stärken zeigen kann, aber eben auch seine Schwächen offenbart. Und genau das ist es, was wir hier beleuchten wollen: ein ehrlicher Blick auf die Vor- und Nachteile des Allradantriebs im Haval Jolion.